.jpg "Схемы управления шаговыми двигателями")
Схемы управления шаговыми двигателями
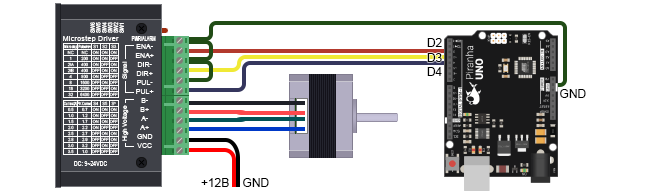
Шаговый двигатель - один из основных компонентов роботехники, ЧПУ-станко, 3D-принетеров и других автоматических систем. В этой статье рассмотрим что это такое, как его подключить и как управлять шаговым двигателем с помощью Arduino. На производстве и в быту при автоматической работе каких-либо механизмов часто требуется точное позиционирование рабочего органа или оснастки. Для этого могут использоваться серво приводы и шаговые двигатели. Эти два вида электропривода значительно отличаются, как по конструкции, так и по особенности работы и управления.









Шаговый двигатель — это бесщеточный двигатель постоянного тока, который может вращаться на малые углы, называемые шагами. Обычно шаговый двигатель использует шагов для полного оборота на градусов, что означает вращение на 1,8 градуса за шаг. Шаговые двигатели применяются во многих устройствах, требующих точного вращения, таких как роботы, антенны, жесткие диски и т. Мы можем вращать шаговой двигатель на определенный угол, предоставив ему соответствующие инструкции.




В системах управления электроприводами для отработки заданного угла или перемещения используют датчики обратной связи по углу или положению выходного вала исполнительного двигателя. Если в качестве исполнительного двигателя использовать синхронный шаговый двигатель , то можно обойтись без датчика обратной связи Дт и упростить систему управления двигателем СУ , так как отпадает необходимость использования в ней цифро-аналоговых ЦАП и аналого-цифровых АЦП преобразователей. Шаговыми двигателями называются синхронные двигатели, преобразующие команду, заданную в виде импульсов, в фиксированный угол поворота двигателя или в фиксированное положение подвижной части двигателя без датчиков обратной связи. Мощность шаговых двигателей лежит в диапазоне от единиц ватт до одного киловатта. Шаговый двигатель имеет не менее двух положений устойчивого равновесия ротора в пределах одного оборота. Напряжение питания обмоток управления шагового двигателя представляет собой последовательность однополярных или двуполярных прямоугольных импульсов, поступающих от электронного коммутатора К.